




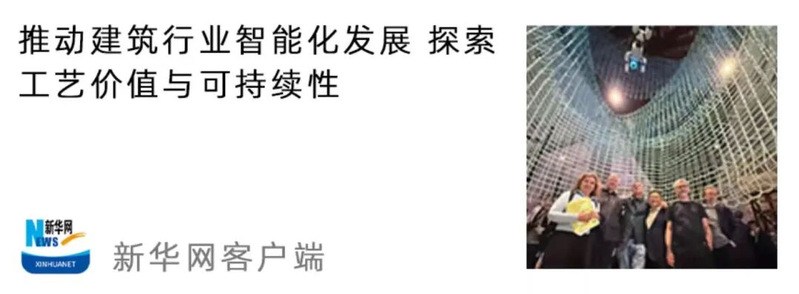
11月1—5日,在2025年威尼斯建筑双年展“智能·自然·人工·集体”(Intelligens · Natural · Artificial · Collective)展览主题学术框架指引下,我院携手麻省理工学院(MIT)、苏黎世联邦理工学院(ETH Zurich)、都灵理工大学(PoliTo)等国际顶尖学府,共同举办“建造未来:威尼斯双年展秋季知识交流论坛”国际工作营。

“未来实验室”走进2025年威尼斯建筑双年展展场,系列学术活动本身成为展览内容。第三次国际合作开放工作营由我院袁烽教授组织发起,主题为建造未来:威尼斯双年展秋季知识交流论坛,本次工作营延续了前两次工作营的共享知识、协同创新、文明互鉴的理念。在人形机器人的空间智能领域展开探索,具体聚焦人形机器人在空间感知与自主建造行为等的强化学习模型训练的框架与流程研究。
我院团队从人机协作与智能建造的前沿视角,为活动注入了全新的活力。工作营内容是训练人形机器人扫描重建自然回收木材,期间将深入探讨人形机器人在建筑构件数据采集中的自主智能发育与强化学习训练框架。结合人工智能技术进展,推动了具身智能在建造领域的场景研发。工作营聚焦于非规则天然木材的数据采集与三维重建,通过团队自研的FURobot平台,控制机器人携带RealSense深度相机,结合YOLOv8目标检测模型实现木材目标的精准识别。借助SLAM辅助定位技术,机器人能够自主规划路径并高效执行数据采集任务。最终,利用3DGS技术对采集到的视觉数据进行后处理,成功实现了利用人形机器人进行高质量的木材三维重建。

这一技术进展不仅推动了人形机器人进入空间建造的场景,也展示了人形机器人在科艺融合的创新潜力。未来,团队还计划继续探索强化学习,优化人形机器人自主智能的模型训练,以提升其在建筑场景中的空间感知能力,以及定义人机协同的空间智能行为范式。
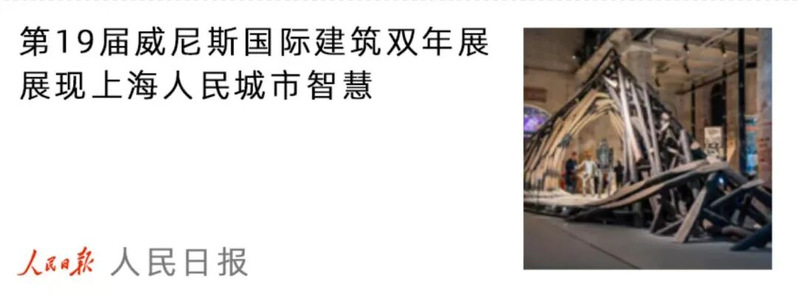
我校持续以国际合作与科研创新推动建筑学科的智能转型。威尼斯建筑双年展系列工作营不仅深化了与麻省理工学院(MIT)、苏黎世联邦理工学院(ETH Zurich)、都灵理工大学(PoliTo)等高校的研究合作,也让我校师生走出实验室,以开放的姿态在全球展览平台上发声,将科研交流转化为公共对话。2025年5月以来,我院团队依托威尼斯双年展参展项目 CO-POIESIS 及系列国际研究合作持续发声,用中国智慧讲述科技与人文共生的故事。其创新实践获得人民日报、新华网、中国日报网、学习强国等主流媒体的持续关注与深入报道,彰显了中国建筑在智能建造与可持续设计领域的国际影响力。
来源:朱雅蕾、冯韵凝、高天轶